
 تويت
تويت
اتماتيه
Automatism - Automatisme
الأتماتية
ليس ثمة تعريف دقيق متفق عليه لمصطلح الأتماتية Autamatism ومعناها الحرفي «ذاتي الحركة» أو «تلقائي الحركة»، بيد أنها تخص في الواقع مجالاً من مجالات العلم والتقانية يهتم بدراسة النظريات والتطبيقات المتعلقة ببنية منظومات التحكم التي تعمل من دون تدخل مباشر من الإنسان. والأتماتية، بهذا المعنى، مجموعة الطرائق والوسائل التقانية التي تستبعد تدخل الإنسان في أعمال معينة, وتضع حلولاً لنماذج رياضية تضبط عمل المنظومات المطلوب تشغيلها ذاتياً وتوجهه. وغالباً ما تكون تلك الحلول في صيغة خوارزميات أو تكون مبنية على أسس نظرية خاصة.
عرف مصطلح الأتماتية منذ أواخر القرن التاسع عشر، وكان القصد منه إيجاد حلول لمشاكل الضبط الذاتي في الآلات والمكنات على النحو الذي وضع أسسه عدد من المهتمين في هذا المجال ومنهم جورج ماكسويل (1868). ولم تحتل الأتماتية مكانتها بأنها فرع مستقل من فروع التقنية إلا في أوائل الثلاثينات من القرن العشرين في المؤتمر الدولي الثاني للطاقة (برلين 1930)، الذي أقر موضوع التحكم الأتماتي والتحكم عن بعد.
ولم يمض عقد من الزمن حتى أضحت الأتماتية مقرراً علمياً وتقنياً له أصوله ومنهجه. ويرتبط تاريخ الأتماتية بتطور الأجهزة الذاتية الحركة والآلات التي ترجع جذورها في الأصل إلى علم الميكانيك والدارات الكهربائية ومنظوماتها, إذ اعترضت تطبيقاتها مشاكل تطلبت حلولاً كضبط الضغط في المراجل البخارية وضبط مسارات المكابس في المحركات البخارية والانفجارية وضبط تواتر دورات المولدات الكهربائية والتحكم في المخارط الأتماتية في أجهزة الأمان الكهربائية. وهكذا فإن الأتماتية كانت تعني منظومات الضبط التي تتحكم في الوسائل التقنية المعروفة آنذاك. غير أن التطور السريع الذي تناول جميع مجالات العلم والتقنية في أواخر النصف الأول من القرن العشرين أدى إلى ازدياد أهمية تقنيات الأتمتة والتحكم حتى شاع استعمالها واتسع مجالها في النصف الثاني من هذا القرن، فشملت مختلف مجالات العلم والصناعة والاقتصاد بدرجات متفاوتة مع زيادة في التعقيد ودقة في الأداء. ولعل أوضح مثال على ذلك ما طرأ على منظومات التحكم الأتماتي في الصناعة، إذ كانت تقتصر على أتمتة بعض المجموعات والجمل أو مكنات بمفردها. ثم أصبحت اليوم منظومات متتامة تتحكم في «ورشات» أو معامل بأكملها. والأهم من ذلك منظومات التحكم في الأشياء التي يبتعد بعضها عن بعض مسافات كبيرة، كالتحكم في المحطات الكهرمائية والمنشآت الصناعية والمركبات الفضائية والمركبات الطائرة المسيرة من بعد وغير ذلك. وتحتل التقنيات الميكانيكية المسيرة من بعد والخاصة بجمع المعلومات ومعالجتها أتماتياً مكانة مهمة في الوقت الحاضر، ويعد الحاسوب ومنظومات التحكم المعقدة أساس هذه التقانات، إذ لا يمكن حل المسائل ذات الصلة بمنظومات التحكم إلا بواسطة تقنيات الحاسوب. بل إن علم الأتماتية توصل إلى إيجاد طرائق ووضع نماذج تجريدية نأت به عن التقنية المجردة، وفسحت له في مكان الصدارة في مختلف مجالات الحياة حتى شملت تطبيقاته الاقتصاد والإدارة وعلم السكان ومختلف العلوم الطبية والصيدلانية والحيوية والجيولوجية والمائية وغيرها.
وتهتم الأتماتية اليوم، من منطلقها العلمي هذا، بوضع نماذج رياضية للمسائل التي تتناولها العلوم الأساسية وتضع الحلول لبعض المسائل الرياضية الصرفة كحساب المتغيرات مثلاً، غير أنها تبقى في أساسها علماً تطبيقياً يستخدم المنهج الرياضي والنماذج الرياضية لتفسير تصرف المنظومات الأتماتية وبعض الظاهرات الطبيعية إلى جانب محاولة التحكم في بعض هذه الظاهرات وتوجيه نشاطها. ولقد أدى تطور الحواسيب إلى إجراء حسابات معقدة لم تكن ممكنة في السابق، وإلى تحويل الرياضيات من علم افتراضي بحت إلى علم تطبيقي حتى غدت نظرية المنظومات والتحكم الأتماتي موضوعاً شاملاً يوحد جميع أوجه النشاط التي تهتم بها الأتماتية وتصلح أساساً لنظرية السيطرة العامة المعروفة باسم السيبرنية [ر].
بنية المنظومات الأتماتيةإن الأتماتية بطبيعتها هي مجموعة من الطرائق والنظريات التي تفرق بوضوح بين المسائل ذات الحالات المتقطعة والأخرى ذات الحالات المستمرة علماً أن كلاً منهما يمكن أن يتخذ أشكالاً متفرعة كأن تكون المنظومة بحلقة واحدة مفتوحة أو مغلقة أو أن تكون خطية أو غير خطية، أو أن تكون ذات معالم (بارامترات) ثابتة أو متغيرة أو أن تكون دينامية محددة أو إحصائية، وغير ذلك.
الأتماتية المتقطعة: إن أبسط أنواع المنظومات الأتماتية هي المنظومات ذات التتابع المشروط، ومثلها حالة الآلة التي يجب عليها القيام في كل مرة بثقب قطعة ميكانيكية تقدم لها بوساطة صحن متحرك.
وقد مرت نظرية المؤتمتات automates [ر] بتطور كبير بفضل الأتماتية.
الأتماتية المستمرة: إن المسائل الرئيسية التي تعد أصل الأتماتية المستمرة هي مسألة الضبط والتحكم باستمرار في منظومة فيزيائية للمحافظة على القيم المحددة سلفاً والتي تسمى تعليمات مرجعية، وذلك مع مراعاة التشويش (التأثيرات غير المرغوب فيها) الذي يميل إلى حرف هذه القيم.
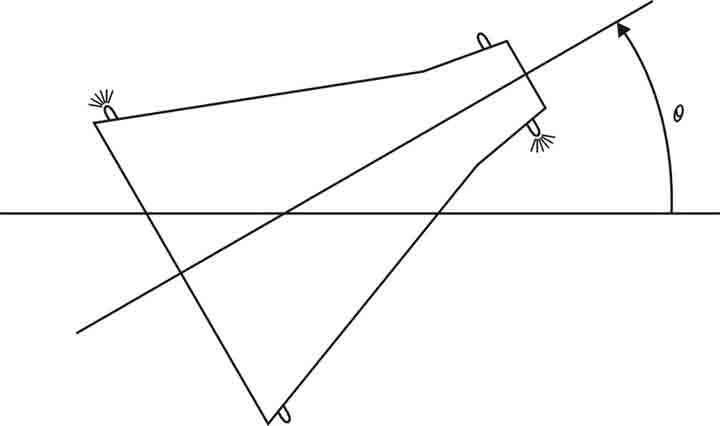 |
| (الشكل -1) التحكم في مركبة فضائية |
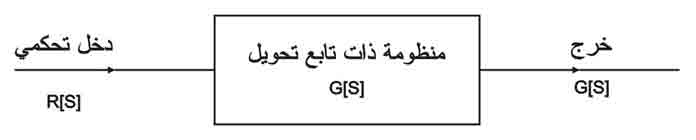 |
| (الشكل -2) مخطط صندوقي لمنظومة تحكمية ذات دارة مفتوحة |
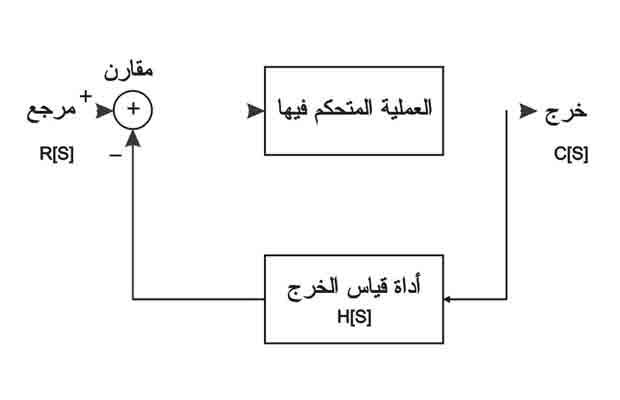 |
| (الشكل -3) مخطط صندوقي لمنظومة تحكمية ذات دارة مغلقة |
وللقيام بذلك فإن في المركبة صواريخ صغيرة لتعديل الاتجاه تؤثر فيها عن طريق مزدوجة معروفة القيمة في أحد الاتجاهين، وتستخدم للتعويض عن التشويش الناتج من أسباب خارجية مثل ضغط الإشعاع الشمسي الذي يميل إلى حرف المركبة عن مسارها. ويسمى هذا النوع من التحكم التحكم بالوصل والفصل. On- off control أو بانغ بانع bang- bang وقد يؤدي هذا النوع من التحكم إلى احتمال حدوث اهتزازات زائدة للمركبة وإلى استخدام مستمر لصواريخ التحكم ثم إلى استهلاك سريع للوقود. ويمكن تحسين أداء هذا النوع من القيادة بترك عتبة حرة يكون التحكم فيها معدوماً. ويحتوي هذا المثال الأولي على العناصر الأساسية لمسألة التحكم في الدخل التي هي مزدوجة تؤثر في الخرج، وهنا يوجد نظام حركي يقال عنه إنه ذو متحول وحيد ونظام حركي أحادي لأنه لا يؤخذ في الحساب إلا دخل واحد وخرج واحد، ويرمز المؤتمتون لهذه العملية بالمخطط الصندوقي لمنظومة ما (الشكل 2).
ويتغير مفهوم النظام الحركي الأحادي إلى نظام متعدد عندما يكون الدخل والخرج أكبر من الواحد. وهي الفكرة التجريدية الأساسية للتحكم الذاتي إذ يمكن تطبيق المفهوم نفسه على كثير من المنظومات الفيزيائية ذات الحالات المتقطعة أو المستمرة. ولهذا التحليل الرياضي تطبيقات واسعة في كل المجالات ليمكن التحكم مثلاً في موضع عربة قطار على سكة حديد أو في قيادة سيارة على طريق أو في غير ذلك. والشيء الأساسي الذي وضح من هذا المثال هو أنه يجب، لضبط نظام ما، قياس خرج النظام أو استجابته، ومقابلته بالدخل، واختيار نوع التحكم فيه، وهذا ما يسمى بالتحكم بالتغذية الخلفية (الراجعة) أو التحكم بالحلقة المغلقة (الشكل 3) بالمقابلة مع تحكم من نوع آخر لا يرتبط بقياس الخرج ويسمى التحكم بالحلقة المفتوحة كما هو مبين في الشكل 2.
الروبوت Robot: (الإنسان الآلي) تلبي نظرية الأتماتية نظرية حل مسائل أتمتة المنظومات المستمرة، ولكن تبقى هنالك مجالات الإنتاج الصناعي المتميزة بعدد من العمليات المتقطعة كما هي الحال في الصناعات التجميعية (كصناعة السيارات)، وتتبع هنا طريقتان متكاملتان تتمثل الأولى بإعادة تصميم عملية التصنيع لتتكامل عمليات النقل والتشكيل والتلقيم في مفهوم كلي يجعل تدخل العاملين في حده الأدنى، وهذا ما يسمى «بالورشات القابلة للتكيف» لأن هذا التنظيم الجديد مبني على تحكم الحواسيب فيها، ويعتمد على البرامج القابلة للتعديل لتنظيم عمل الورشة على النحو المرغوب فيه. والتنظيم الأمثل لعمل هذه الورشات مسألة معقدة جداً وكثيرة الاحتمالات فيما يتصل بالرياضيين التطبيقيين والمهندسين.
أما الطريقة الثانية فتختلف عن الأولى بالمحافظة على التنظيم التقليدي لخط الإنتاج وبأتمتة مواقع العمل أيضاً وذلك بمساعدة أجهزة تقلد حركات الإنسان وقد تكون لها صفات تشبه صفاته وتسمى الروبوت (الإنسان الآلي).
أما جيل الروبوت المصنَّع حالياً فما هو إلا أجهزة تحكم تتحكم فيها معالجات مبرمجة Processors وأهم مشاكل أتمتتها هو ضبطها والتحكم فيها مهما يكن وضع الذراع وحِمْلها. وتسمح هذه الروبوتات بتصنيع قطع مختلفة مثل عناصر هياكل السيارات الموضوعة على خط الإنتاج وتركيبها. ويقوم السير الناقل بإعطاء إشارة البرنامج المطلوب لتنفيذ التصنيع والحركة بحسب الإشارات أو الرموز الموضوعة عليه.
والاتجاه العام هو إيجاد جيل جديد يكون فيه للربوت مجسات أكثر تطوراً وكمالاً تمكنه من العمل طبقاً لتغير الأحوال، لا على نحو جامد وطبقاً لبرنامج ثابت معد من قبل. ومن هذه الأجهزة المجسات البصرية واللمسية التي تتحسس بالشروط الحرارية والكيمياوية والإشعاعية والصوتية وغيرها. وتتيح هذه العناصر للروبوتات التصرف بفاعلية في بيئات معقدة جداً، ويقال عن هذا التصرف إنه (ذكاء صنعي).
نظرية المنظومات الأتماتيةإن إحدى الطرائق لضبط أداء منظومة ما هي قياس إشارة خرجها (استجابتها) ثم اختيار إشارة التحكم المناسبة تبعاً للخرج المقيس وإشارة المرجع أي التحكم بالتغذية الخلفية (الراجعة) أو بالحلقة المغلقة (الشكل 3).
وقد استخدمت نظرية التحكم التقليدية في جيل الحواسيب التمثيلية analogue computers لمعالجة المنظومات الخطية ذات المعالم (البارامترات) الثابتة.
ويعبر رياضياً عن استجابة المنظومة المعطاة في المخطط الصندوقي المبين في الشكل 2 وذات البارامترات الثابتة بالعلاقة الرياضية التالية:

وهي ما يعرف باسم نظرية الطي convolution ويرمز له بالصيغة: (c(t)=g(t)*r(t
وتكون الاستجابة النبضية g(t) صفراً من القيم السالبة للزمن t وذلك لكي تكون المنظومة حقيقية فمن أجل τ>t لا يؤثر الدخل r(t) في الخرج c(t). وبتطبيق تحويل لابلاس على هذه المتغيرات وباستعمال الأحرف اللاتينية الكبيرة لهذا التحويل تابعاً لمتحول عقدي «S» نحصل على:

حيث يسمى (G(s تابع تحويل المنظومة الذي يمكن بواسطته إيجاد توابع تحويل المنظومات التسلسلية والتفريعية ذات التغذية الخلفية. وإذا أردنا إيجاد تابع تحويل منظومة ذات تغذية خلفية سالبة كما في الشكل 3 فإننا نحصل على ما يلي:
وتوصف المنظومات التحكمية في مستوى الزمن إما بمجموعة من المعادلات التفاضلية من الدرجة الأولى (فضاء الحالة) أو بوساطة معادلة تفاضلية درجتها مساوية لدرجة المنظومة. ولإيجاد تابع تحويل المنظومة المعطاة بهذه الصيغة التفاضلية أي:

حيث c = هي خرج المنظومة وr ≡ هو دخل المنظومة التحكمي
 و
و 
تستعمل قاعدة تحويل لابلاس لمشتق التابع التالية:

وبفرض أن القيم الابتدائية للتابع وجميع مشتقاته مساوية للصفر

فإن تحويل لابلاس للمعادلة التفاضلية السابقة يصبح:

وبالتالي فإن تابع تحويل هذه المنظومة يعطى بالصيغة:

ويمكن إيجاد معكوس تحويل لابلاس لذلك التابع بتحليله إلى عوامل بسيطة وباستخدام جداول تحويل لابلاس. وللتثبت من استقرار المنظومة ينبغي أن يكون الجزء الحقيقي لجذور المعادلة المميزة لهذه المنظومة سالباً.وتعتمد طرائق التصميم والتعويض على دراسة المعادلة المميزة (مثل معيار روث Routh) أو على نظرية نايكويست البياني Nyquist التي تفترض معرفة مسار نايكويست البياني[G(jw)] في المستوى العقدي من أجل: ∞+≥ω≥∞- وذلك اعتماداً على تابع تحويل الحلقة المفتوحة للمنظومة أو بالطريقة التجريبية إذا كان هذا التابع مجهولاً. وتبين نظرية نايكويست أن المنظومة ذات التغذية الخلفية الواحدية السالبة تكون مستقرة إذا كان مسار نايكويست محيطاً بالنقطة (-1) بالاتجاه الموجب عدداً من المرات مساوياً لعدد الأقطاب المسببة لعدم الاستقرار في التابع G (s) وعند وجود منظِّم أو معوِّض له تابع تحويل Gc (S) فيتم التثبت من الاستقرار باستخدام مسار G(S)Gc(s) بدلاً من مسار G(s) على حدته. لهذا فإنه يمكن اختيار المعوِّض Gc(s) الذي يقوم بإعادة تشكيل المسار بالشكل المرغوب فيه مثل إبعاده عن النقطة (-1)، وهناك طرائق بيانية أخرى لتحليل المنظومات وتصميمها، وأكثرها استخداماً طريقة «بود» التي تعتمد على رسم مخططين أحدهما لوغاريتم ربح تابع التحويل│ (Log│G(jw بدلاً من Log w والآخر طور G(jw) بدلالة Log w. وهي تبنى على افتراض دخل جيبي بتردد w وثمة طريقة أخرى هي طريقة مسار الجذور وتبين تغير مواقع جذور المعادلة المميزة بدلالة تغير الربح الصرف في المنظومة.
المنظومات اللاخطية: nonlinear system هي كل المنظومات التي لا يمكن تطبيق مبدأ التراكم Superposition عليها، وتطرح مسألة منظومات التحكم اللاخطية إما بسبب كون عناصر المنظومة لا خطية أو لأن التعويض المدخل على المنظومة لاخطي، وذلك لتحسين أداء هذه المنظومة.
 |
| (الشكل -4) خواص تابع تحويل عدد من العناصر اللاخطية الرئيسية أ- واصل فاصل (بانغ ـ بانغ) ب- ذو منطقة ميتة. ج- عنصر ذو إشباع |
(4-ب) والعنصر ذو الإشعاع المبين بالشكل (4-ج) والكثير من العناصر الأخرى التي لا تخضع لتعريف العنصر الخطي. ويستخدم لمعالجة هذه المنظومات اللاخطية عدد من الطرائق التحليلية والبيانية. وتسمى أولى هذه الطرائق طريقة التابع الوصفي describing function حيث تطبق على العناصر اللاخطية التي لها خاصية وجود خرج (Y) على شكل تابع ترددي، وذلك إذا كان دخل المنظومة جيبياً. وهي لسهولتها أكثر الطرائق استخداماً لفحص تأثير خواص العناصر اللاخطية.
أما الطريقة الثانية فتسمى «مستوى الطور» The phase plane وهي طريقة يغلب عليها أنها بيانية تعتمد على رسم تغيرات متحولات الحالة state variables بدلالة بعضها واعتبار الزمن متحولاً ضمنياً.
أما الطريقة الثالثة فتسمى طريقة ليابونوف المباشرة Liapunov direct method وتعتمد أيضاً على تمثيل فراغ الحالة State Space من أجل عدد «n» من المتحولات وتستخدم عندما تكون درجة المنظومة كبيرة نسبياً.
منظومات التحكم الرقمية: عندما تذكر المتحولات في أثناء مناقشة المنظومات عامة فإن المقصود منها
| المتحولات المستمرة زمنياً والمعروفة من أجل الزمن | ∞+ | > | t | ≥ | o |
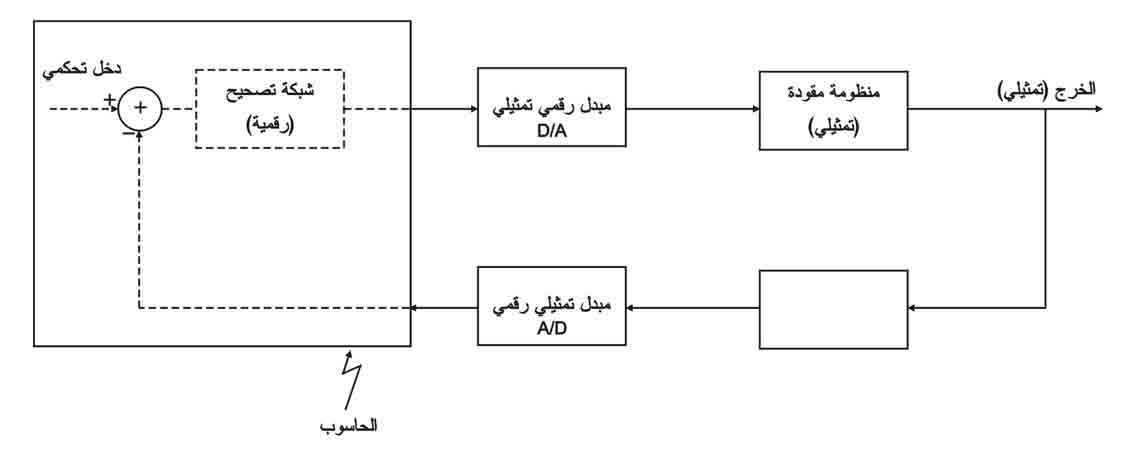 |
| (الشكل -5) منظومة تحكم رقمية |
ويوجد في منظومة التحكم الرقمي عنصر آخر أو أكثر يسمى المبدل الرقمي التمثيلي - digital - analog converter يقوم بالعملية العكسية، أي إنه يحول إشارات القيادة والتصحيح الرقمية الناتجة من برنامج خاص في الحاسوب إلى إشارات تمثيلية مستمرة تستطيع أن تتلقاها المنظومة المقودة التي تكون في العادة منظومة تمثيلية مستمرة، ويمكن تمثيل المنظومات المتقطعة الخطية ذات المعالم (البارامترات) الثابتة زمنياً بالعلاقة التالية:
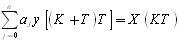
حيث المعالم aJ هي ثوابت من أجل (j..0,1---n)وحيث k ثابت يأخذ القيم 2,1,0,...وT ثابت موجب، أما Y(kT) فيمثل سلسلة الخرج وX(KT) سلسلة الدخل. وتسمى المعادلات الواصفة لعمل المنظومة الرقمية أو المتقطعة بمعادلات الفرق التي يمكن تطبيق تحويل (Z) عليها بالطريقة نفسها التي يطبق فيها تحويل لابلاس (s) لحل المعادلات التفاضلية العادية، وليس تحويل (Z) بالحقيقة إلا تفسيراً خاصاً أو تعديلاً بسيطاً لتحويل لابلاس.
نظريات التحكم الحديثةهنالك عدد من العوامل التي أدت إلى تطور نظريات التحكم الحديثة، ومن هذه العوامل ضرورة التعامل مع نماذج للمنظومات أكثر واقعية وأكثر استخداماً للتقنيات الحديثة, والاتجاه السائد هو تحقيق مزيد من التحكم الأمثل وتصميم منظومات مثلى بتطوير تقنيات المجسات والدارات الرقمية والمتكاملة والمعالجات المكروية وخفض تكاليفها وتجاوز سلبيات الطرائق التقليدية ونقائصها.
والانتقال من استخدام النماذج التقريبية البسيطة السهلة إلى أكثر النماذج واقعية أدى إلى وجود أثرين: أولهما إمكان إدخال عدد كبير من المتحولات في النموذج المطلوب، وثانيهما ميل النموذج الأكثر واقعية إلى احتواء العناصر اللاخطية والمعالم (البارامترات) المتغيرة زمنياً وإلى إدخال كثير من الجوانب التي كانت تهمل سابقاً لصعوبة معالجتها بالطرائق التقليدية.
وإن الميل إلى التعامل مع منظومات أكثر تعقيداً ومؤلفة من مكونات كثيرة متفاعلة فيما بينها، والحاجة المتزايدة إلى دقة أكبر ومردود أعلى، قد أديا إلى تغير اتجاهات تحديد أداء المنظومات. وقد تبدلت التقييدات التقليدية المعروفة مثل نسبة التخطي Overshoot وزمن الركود Settling Time وحزمة المرور وغيرها إلى معايير مثلى مثل الطاقة الأصغرية والكلفة وزمن التشغيل الأصغري، وكذلك فإن الرغبة في جعل هذه الخواص أصغرية تستدعي عدم التغاضي عن بعض الخواص اللاخطية، وقد يتطلب الأمر في بعض الحالات، التي تستهدف جعل المنظومة مثلى، تطبيق قوانين تحكم لاخطية ومتغيرة زمنياً، وحتى ولو كانت المنظومة الأساسية خطية وذات معالم (بارامترات) ثابتة زمنياً.
نظرية المنظومات باستخدام متحولات الحالة: (التمثيل المصفوفي): تدرس نظرية المنظومات الخطية (الثابتة المعالم والمحددة البعد) المنظومات المستمرة أو المتقطعة باستعمال نماذج رياضية كما يلي: في حالة المنظومة المستمرة يكون النموذج:
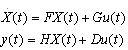
حيث

وفي حالة المنظومة المتقطعة يكون النموذج:
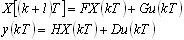
ويسمى هذا الترتيب بتمثيل فراغ الحالة حيث:
U(t) شعاع الدخل المؤلف من m عنصر عند اللحظة t.
X(t) شعاع من فراغ الحالة ذي البعد n المسمى ببعد المنظومة.
Y(t) شعاع الخرج المؤلف من p عنصر
F وG وH وD تمثل مصفوفات ذات أبعاد مناسبة تكون قيم عناصرها أعداداً حقيقية (ومستقلة عن الزمن لمنظومة ثابتة).
وإذا كان m=p=1 فيقال عن المنظومة إنها متحول وحيد monovariable والتعريفات السابقة تبقى صحيحة في منظومة متقطعة ماعدا تغير كل متحول زمني مستمر عند اللحظة t إلى آخر متقطع يكون موجوداً فقط عند لحظات محددة (KT)، حيث T الزمن بين عينتين، و K المتحول لقيم صحيحة، ويأخذ كل القيم الممكنة K=0,1,2,...m ويمكن حل معادلات الحالة بالمجال الزمني بدءاً من الحالة الابتدائية X(t0) حيث:

ومن أجل t0 = 0 تصبح:
حيث (Φ(t مصفوفة الحالة العابرة المعرفة بما يلي

وإذا أخذ تحويل لابلاس من أجل المنظومات المستمرة يكون:

وإذا أخذ تحويل z من أجل المنظومات المتقطعة يكون:

وإذا أخذت عينات منظومة مستمرة كل T ثابتة وكان الدخل ثابتاً بين لحظتي أخذ عينتين متتاليتين يكون:

التحكم الأمثل: إن إحدى نقاط الضعف الرئيسية في تصميم المنظومات باستخدام أساليب التحكم التقليدية تتعلق باعتماد هذه الأساليب كثيراً على طريقة الخطأ والصواب في حين يتعلق أسلوب التحكم الأمثل Optimal Control بالحصول على منظومة تحكم هي أفضل ما يمكن بالنسبة لمعيار أداء محدد سابقاً، وذلك عن طريق قياس الأداء الفعلي للمنظومة، ويسمى هذا المعيار أو المقياس «معيار الأداء» وتعد عملية تصميم منظومات التحكم المثلى إحدى أهم المشكلات التي تواجه مهندس التحكم في وقتنا الحاضر وأعقدها.
وقد شرع في تطوير مفهوم التحكم الأمثل في الخمسينات من القرن العشرين انطلاقاً من المفهوم العام لتصميم المنظومة المثلى واعتماداً على جعل معيار أداء معين معياراً أمثل لبعض الكميات والمعالم (البارامترات) المحددة سابقاً، وقد طور عدد من العلماء فيما بعد مفهوم التحكم الأمثل، فمنهم من عمل على جعل زمن الاستجابة العابرة هو الأمثل، ومنهم من جعل استهلاك الطاقة هو الأمثل (أي أقل ما يمكن)، ولقد حدث تطور كبير منذ ذلك الوقت لمفهوم التحكم الأمثل، وتتعلق أهم هذه التطورات بما يسمى البرمجة الحركية ومفهوم الأعظمية.
وتتعلق المشكلة الرئيسة في نظرية التحكم الأمثل باختيار الدخل «u» لمنظومة التحكم ليكون أداء هذه المنظومة أمثل بالنسبة إلى معيار أداء محدد، أما الهدف الرئيس لنظرية التحكم فيتعلق بتصميم عناصر تحكم يمكنها التجاوب مع متطلبات عمل واسعة المجال وذلك أفضل طريقة ممكنة، ويمكن وصف هيكلية مسألة التحكم الأمثل بتحديد معيار أداء له الشكل العام التالي:
حيث: J يمثل هنا معيار الأداء
(X=F(x.u.t تمثل حركية المنظومة المتحكم فيها
(u) تمثل التحديدات على الدخل أو على حالة المنظومة0(x).
(r) تمثل إشارة المرجع أو الجواب المرغوب فيه للخرج (c).
ويقال عن التابع (G) إنه تابع الخسارة، ويمثل مقياساً للتغير الآني للأداء الأمثل، ولهذا يمكن تفسير معيار الأداء على أنه الخسارة الكلية.
وتتعلق مسألة التحكم الأمثل بتحديد دخل التحكم (u) الذي يجعل معيار الأداء أقل ما يمكن، مع الأخذ بالحسبان بعض التحديدات الواقعة على (u) و (x)، وقد يكون التحكم الأمثل إما حلقة مفتوحة أو حلقة مغلقة، وتفضل طريقة الحلقة المغلقة لأن عمل التغذية الخلفية يجعل المنظومة أقل حساسية بالتغيرات الداخلية الحاصلة في المنظومة وبالتشويش الداخلي والخارجي وتستخدم فيه أحدث المعلومات المتوافرة عن الحالة الحاضرة للمنظومة المتحكم فيها.
البرمجة الحركية (الديناميكية): يعتمد مفهوم البرمجة الحركية Dynamic Programming على نظرية التحكم الأمثل وعلى النتائج الحاصلة من تطبيق هذه النظرية. ويبينمفهوم الحالة المثلى أنه مهما كانت الحالة الابتدائية للمنظومة أو القرار الأولي المطبق عليها، فإن على القرار اللاحق أن يكوّن سياسة تحكم مثلى وذلك بالنسبة إلى الحالة الناتجة من القرار الأول، وبذلك تنقسم مسألة القرار الأمثل إلى سلسلة مسائل صغيرة سهلة الحل. وتعد عملية القرار ذي المراحل مثالاً على المسألة التي يمكن تبسيطها كثيراً بتطبيق مفهوم البرمجة الحركية. ويمكن تبسيط مسألة عدد مراحل قراراتها (n) إلى مسائل تتطلب حل مراحل عددها (n) كل منها على حدته، أي تصبح المسألة إيجاد (n) قرار بشكل تسلسلي، وتكون البرمجة الحركية المباشرة عملياً، طريقة حل أمثل وبشكل عكسي مع الزمن، أي نجد أولاً حل المرحلة الأخيرة للعملية ثم حلول المراحل الباقية تباعاً حتى الحصول على حل كامل.
وينتج من تطبيق مفهوم الأمثلية معادلة تفاضلية جزئية تسمى معادلة هاملتون ويؤدي حلها إلى تحقيق سياسة تحكمية أمثلية.

حيث (G) تابع الخسارة و(u) تحديدات الدخل و(r) إشارة مرجعية و(t0) الزمن الابتدائي و(c) الخرج.
المحاكاة التمثيلية والمهجنة والرقمية: تمكن محاكاة منظومة تمثيلية بوساطة تكامل المعادلات التفاضلية للمنظومة باستخدام الحاسوب التمثيلي، وتعتمد الدارات الإلكترونية لهذا الحاسوب اعتماداً رئيسياً على ما يسمى بمضخم العمليات:
وإذا أخذنا مثالاً على ذلك محاكاة المنظومة الممثلة بالمعادلة التفاضلية التالية:
حيث r0sin wt الدخل وy الخرج فنحصل على:
ويمكن تمثيل ذلك بالمخطط الصندوقي التالي مع مراعاة قيم الشروط الابتدائية اللازمة (الشكل 6) ويؤدي استخدام حاسوب رقمي مع الحاسوب التمثيلي إلى تكوين ما يسمى بالحاسوب المهجن. وهو مفيد جداً لمحاكاة منظومة التحكم الرقمية التمثيلية حيث يتولى القسم التمثيلي من الحاسوب المهجن معالجة المتغيرات التمثيلية ويتولى القسم الرقمي منه معالجة المتغيرات الرقمية. وإذا استخدمت خوارزمية عددية لمنظومة ما على حاسوب رقمي فإنه يكون لدينا محاكاة رقمية للمنظومة.
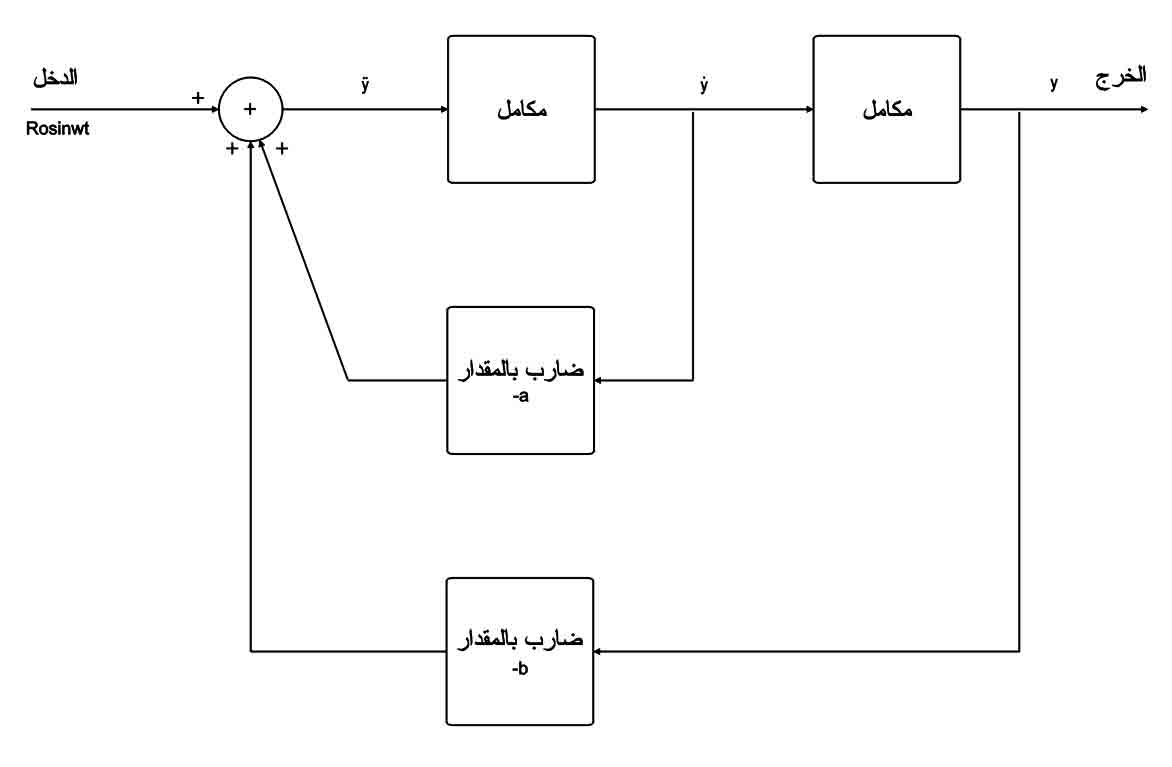 |
| (الشكل -6) محاكاة للمنظومة الممثلة بالمعادلة التفاضلية |

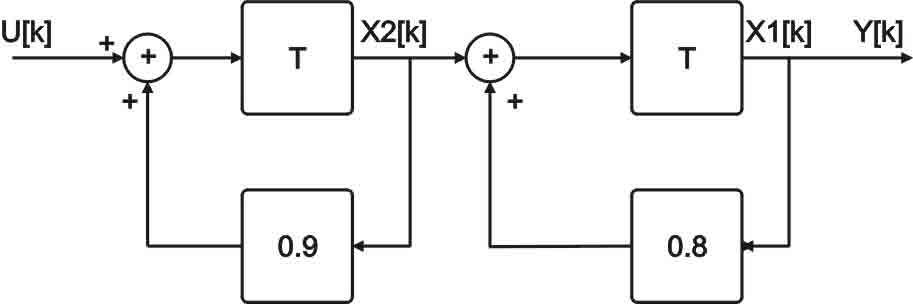
حيث (u) الدخل و(y) الخرج.
وبتطبيق تحويل z على معادلة الفرق السابقة فإننا نحصل على:

ويصبح مخطط المحاكاة، مع اعتبار الأخير، ممثلاً بالصندوق T، كما في الشكل 7.
 |
 |
| الشكل (7) محاكاة رقمية للمنظومة الممثلة بمعادلة الفرق | (الشكل -8) التحكم الموائم أ- طريقة تغيير إشارة التحكم ب- طريقة تركيب إشارة التحكم |
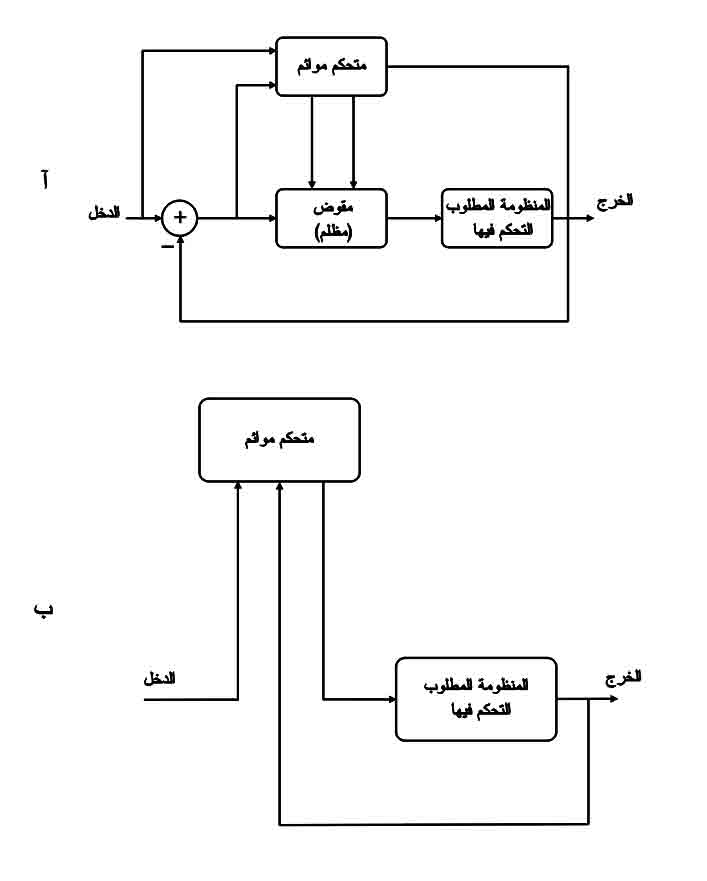
إن نظرية التحكم المؤائم Adaptive control هي محاولة لحل مسألة قيادة المنظومة ذات النماذج المجهولة أو ذات البيئة المجهولة أو القابلة للتغير بشكل غير معروف من قبل، وذلك باستخدام التقنيات الخطية لتقدير المعالم (البارامترات) وللقيادة.
ويعد مفهوم الذاتية أو التحكم الأمثل طريقة متطورة لتجاوز مشاكل التحكم التقليدي بشكل أكثر واقعية، فبدل أن ترتب المنظومات لتستطيع التجاوب مع دخول ومعالم (بارامترات) متوقعة فإنها تصمم لتستطيع ذاتياً مراقبة أدائها مراقبة مستمرة وذلك بالنسبة إلى معيار أداء معرَّف من قبل أو إلى شرط أمثل، وتهيأ لها وسيلة لتعديل معالمها الذاتية بتأثير حلقة مغلقة للوصول إلى ذلك الشرط الأمثل، وبمعنى آخر فإن المنظومة تعدل نفسها ذاتياً، ويظهر ذلك توضيحاً بالشكل 8ـ آ بطريقة تغير إشارة التحكم أو بالشكل 8 - ب بطريقة تركيب إشارة التحكم.
ويمكن القول إن التحكم الأمثل يبدي أيضاً نمطاً بدائياً من أنماط التعلم وذلك من خلال تعديله الذاتي للوصول إلى هدف محدد، وهنالك بحوث كثيرة حول جانب التعلم هذا وخصوصاً الجوانب التطبيقية من نظريات التكيف حيث يتلاقى الكثير من النظريات والتقنيات الحديثة، مثل الذكاء الصنعي والتمييز النظري والفعلي والروبوتات المتطورة والحواسيب الرقمية والمهجنة ونظريات التحكم الأتماتي الرقمية والمستمرة وتقنياتها.
هادي العرفي
| الموضوعات ذات الصلة: الأتمتة - الآلية المؤازرة - السيبرنية - المحاكاة. |
مراجع للاستزادة: ـ هادي العرفي، نظم التحكم الآلي (الكتب الجامعية بدمشق 1983). - W.L.BROGAN, Modern Control Theory (Quantum Series, N.Y.1974). - P.EMANUEL, introduction to Feedback Control Systems (Mc Graw- Hill 1979). - C.L. PHILIPS& H.T.NAGLE, Digital Control System: Analysis and Design (Printice- Hall 1984). |
التصنيف : التقنيات (التكنولوجية)
النوع : تقانة
المجلد: المجلد الأول
رقم الصفحة ضمن المجلد : 277
مشاركة :
انشر
اترك تعليقك
الاسم
البريد الإلكتروني
نص التعليقكود التحقق
آخر أخبار الهيئة :
- دور النشر والمكتبات المعتمدة لتوزيع الموسوعة العربية
- دار الفكر الموزع الحصري لمنشورات هيئة الموسوعة العربية
- صور من الجناح الخاص بالموسوعة العربية في معرض الكتاب
- تهنئة من هيئة الموسوعة العربية للأستاذ الدكتور محمد ماهر قباقيبي
- نشرت صحيفة الثورة بعددها الصادر بتاريخ 2/2/2016 مايلي
- التقت الثورة الدكتور محمود حمود رئيس موسوعة الآثار في سورية ومدير آثار ريف دمشق لتقلب معه صفحات عدة حول موسوعة الآثار السورية. فكان اللقاء التالي:


البحوث الأكثر قراءة
اصدارات الموسوعة العربية

أسماء الباحثين
هل تعلم ؟؟
- - هل تعلم أن الأبلق نوع من الفنون الهندسية التي ارتبطت بالعمارة الإسلامية في بلاد الشام ومصر خاصة، حيث يحرص المعمار على بناء مداميكه وخاصة في الواجهات
- - هل تعلم أن الإبل تستطيع البقاء على قيد الحياة حتى لو فقدت 40% من ماء جسمها ويعود ذلك لقدرتها على تغيير درجة حرارة جسمها تبعاً لتغير درجة حرارة الجو،
- - هل تعلم أن أبقراط كتب في الطب أربعة مؤلفات هي: الحكم، الأدلة، تنظيم التغذية، ورسالته في جروح الرأس. ويعود له الفضل بأنه حرر الطب من الدين والفلسفة.
- - هل تعلم أن المرجان إفراز حيواني يتكون في البحر ويتركب من مادة كربونات الكلسيوم، وهو أحمر أو شديد الحمرة وهو أجود أنواعه، ويمتاز بكبر الحجم ويسمى الش
- هل تعلم أن الأبسيد كلمة فرنسية اللفظ تم اعتمادها مصطلحاً أثرياً يستخدم في العمارة عموماً وفي العمارة الدينية الخاصة بالكنائس خصوصاً، وفي الإنكليزية أب
- - هل تعلم أن أبجر Abgar اسم معروف جيداً يعود إلى عدد من الملوك الذين حكموا مدينة إديسا (الرها) من أبجر الأول وحتى التاسع، وهم ينتسبون إلى أسرة أوسروين
- - هل تعلم أن الأبجدية الكنعانية تتألف من /22/ علامة كتابية sign تكتب منفصلة غير متصلة، وتعتمد المبدأ الأكوروفوني، حيث تقتصر القيمة الصوتية للعلامة الك

عدد الزوار حاليا : 19
الكل : 9427977
اليوم : 2124
الانسمامات
الانسمامات الانسمام intoxication حالة مرضية تصيب الشخص نتيجة دخول كمية قليلة من إحدى المواد الغريبة إلى جسمه، وقد تنتهي هذه الحال المرضية في الانسمامات الشديدة بالوفاة، أو قد تترك بعض العقابيل الدائمة بعد الشفاء. ويشترط أن تبلغ الجرعة المأخوذة من السم حداً معيناً خاصاً بكل مادة حتى تظهر على الشخص الأعراض التي تزداد شدتها مع زيادة الجرعة. وبذلك يختلف الانسمام عن عدم التحمل الذي ينجم أيضاً عن دخول مادة غريبة إلى جسم الإنسان، إلا أن ظهور الأعراض وشدتها في هذه الحال لا علاقة لهما بمقدار المادة الغريبة الداخلة إلى الجسم.
المزيد »
المجلدات الصادرة عن الموسوعة العربية :
 المجلد الأول
المجلد الأول المجلد الثاني
المجلد الثاني المجلد الثالث
المجلد الثالث المجلد الرابع
المجلد الرابع المجلد الخامس
المجلد الخامس المجلد السادس
المجلد السادس المجلد السابع
المجلد السابع المجلدالثامن
المجلدالثامن المجلد التاسع
المجلد التاسع المجلد العاشر
المجلد العاشر المجلد الحادي عشر
المجلد الحادي عشر المجلد الثاني عشر
المجلد الثاني عشر المجلد الثالث عشر
المجلد الثالث عشر المجلد الرابع عشر
المجلد الرابع عشر المجلد الخامس عشر
المجلد الخامس عشر المجلد السادس عشر
المجلد السادس عشر المجلد السابع عشر
المجلد السابع عشر المجلد الثامن عشر
المجلد الثامن عشر المجلد التاسع عشر
المجلد التاسع عشر المجلد العشرون
المجلد العشرون المجلد الواحد والعشرون
المجلد الواحد والعشرون المجلد الثاني والعشرون
المجلد الثاني والعشرون
arab-ency.com.sy © 2022 All Rights Reserved | powered by tss-est.net
للاعلان على موقعنا [ اضغط هنا ]