
 تويت
تويت
روبوتيه
Robotics - Robotique
الروبوتية
الروبـوت robot جهـاز إلكتروميكانيكي قابل للبرمجة على عدة درجات من حرية الحركة، ويستطيع أداء مهام متعددة. تُعرَّف «درجات الحرية» (degrees of freedom) DOF، المشار إليها بالرموز a,b,d,U,Y,W في الشكل1، بأنها حركات مستقلة متتالية يستطيع الجهاز القيام بها، وتدعى أيضاً بالحركية mobility.
لمحة تاريخية
عرف العالم منذ العصور القديمة الكثير من المخترعات التي تعمل آلياً وتشبه عمل الروبوت وفق تصميم محدد. ومن ذلك طرائق إغلاق منافذ الأهرام لدى المصريين القدماء واستخراج المياه ورفعها والساعات المائية والدقاقة التي عرفها العرب وصمموها ونفذوها. ويورد كتاب «الحيل» لبني موسى بن شاكر نماذج كثيرة تشبه في عملها عمل الروبوت الحديث، إلا أن حركتها تعتمد على مصادر طاقة الماء أو الريح. ومن ذلك مثلاً: صنعة سراج يخرج الفتيلة لنفسه ويصب الزيت لنفسه وكل من يراه يظن أن النار لا تأكل من الزيت ولا من الفتيلة شيئاً، ويُعرف هذا السراج بسراج الله، ومن ذلك أيضاً المنبر الذي صممه الحاج يعيش المالقي للجامع الكبير بقرطبة، فيخرج المنبر من الحائط بقوة دفع المياه عند صعود الإمام، ويعود إلى موضعه حين ينزل. ويعد ليوناردو دافنشي (ق 15 م) أول من وضع تصاميم ونماذج مشابهة للروبوت، لكن كلمة الروبوت ظهرت للمرة الأولى في مسرحية للكاتب المسرحي التشيكوسلوفاكي كارل تشابك[ر] Karl Capek في مسرحيته «إنسان روسوم الآلي الشامل» Rossum’s Universal Robots. وتعني كلمة روبوتا robota في اللغة التشيكية العامل أو الخادم الريفي. وتولى إسحق عظيموف Isaac Asimov عام 1930 نشر مصطلح الروبوتية robotics عبر مجموعة كبيرة من قصص الخيال العلمي المبتكرة.
يعد جوزيف أنغلبرغر Joseph Engelberger وجورج ديفو George Devold الأبوين الروحيين للروبوت الصناعي، فقد قامت شركتهما يونيماشن Unimation بصنع أول روبوت صناعي عام 1961 وسمي باسم بوما Programmable Universal (PUMA) Manipulator Arm.
المبادئ العامة للروبوتية ومكوناتها الأساسية
تشتمل جميع تطبيقات الروبوتية على ثلاث مكونات أساسية هي: الحساسات، والروبوت، والتحكم الحاسوبي كما هو موضح في الشكل2. فبوساطة الحساسات يتم التقاط معطيات المحيط الذي يجب على الروبوت أن يعمل ضمنه، وتشكل هذه المعطيات بيانات دخل للبرنامج الحاسوبي الذي يتحكم بحركة الروبوت وأدائه.
وأهم أنواع الحساسات المستخدمة في الروبوتات هي حساسات الرؤية، مثل الكاميرات بأنواعها، والحساسات الضوئية وتحت الحمراء، إضافة إلى حساسات الصوت واللمس والقوة والضغط والمسافة والحركة وغيرها.
أما أهم طرائق التحكم بالروبوت فهي:
1ـ التحكم من بعد teleportation: وفيه يتولى المستخدم البشري التحكم بحركة الروبوت بوساطة عصا قيادة أو بوساطة جهاز تحكم من بعد وتوجيه حركته نحو الهدف.
2ـ التخزين المسبق للحركة lead through programming: يجري تخزين المِعاملات والقيم الرقمية للمسار المطلوب، ويتحرك الروبوت وفق هذا المسار المخزَّن في ذاكرته فقط.
3ـ البرمجة المسبقة offline programming: يُبرمج الروبوت للقيام بالحركة وفق برنامج حاسوبي محدد مسبقاً.
4ـ الحركة المستقلة autonomous: يتحكم الروبوت فيها بحركته مستقلاً وتلقائياً، فيقوم الروبوت بتعلم مسار الحركة من خلال أمثلة سابقة يمكن تزويده بها.
يمكن استخدام إحدى هذه الطرائق أو تركيب أكثر من طريقة لاستخدامها معاً.
أنواع الروبوتات
يمكن تصنيف حركة الروبوت وفق عدة نظم مختلفة:
ـ الخطّي cartesian: يتحرك الروبوت وفق ثلاثة محاور خطية (X,Y,Z). ويستخدم عادة لحمل ونقل الأوزان الثقيلة (الشكل ـ3).
ـ الأسطواني cylindrical: يتحرك الروبوت وفق نظام الإحداثيات الأسطوانية (R, Θ,Z). ويستخدم عادة في عمليات التجميع (الشكل ـ4).
ـ الكروي spherical: يتحرك الروبوت وفق نظام الإحداثيات الكروية (R, Θ, Φ) (الشكل ـ5).
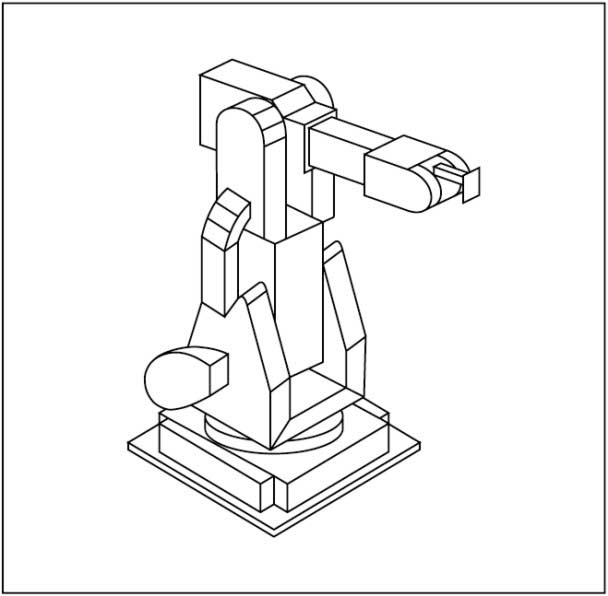
ـ المفصلي articulated: حيث يتم التحكم بوضعية الروبوت بثلاث زوايا. يشبه هذا النوع في حركته يد الإنسان، وهو متعدد الاستخدامات وأكثر الروبوتات انتشاراً، إلا أنه أكثرها صعوبة برمجة (الشكل ـ6).
ـ الذراع المفصلي المطاوع الانتقائي SCARA (selective compliance articulated robot arm): وهو مزيج بين الروبوت الأسطواني والروبوت المفصلي بطريقة تسمح بالاستفادة من إيجابيات كل نوع منهما، وتستطيع ذراع الروبوت التحرك نحو الأعلى أو الأسفل وبزاوية حول محور الأسطوانة كما في الروبوت الأسطواني، ولكنها تكون موصولة بطريقة التفافية لتسمح للروبوت بأخذ وضعيته بدقة وسرعة (الشكل ـ7).
وهناك أنواع كثيرة أخرى من الروبوتات مثل المتحرك على عجلات، أو المتوازي الذي يقوم بأداء عدة مهام في وقت واحد، إضافة إلى الروبوتات التي تماثل حركة الحشرات والحيوانات والإنسان.
أجزاء الروبوت
الروبوت جهاز الكتروميكانيكي يتكون من أجزاء كهربائية وأخرى ميكانيكية، لذلك فإن نوعية الأنظمة المستخدمة للتحكم به تحدد خصائصه الأساسية كالسرعة والدقة والتكرارية والقدرة على حمل الأوزان. وفيما يلي أهم التقنيات المستخدمة في تصنيع أجزاء الروبوت:
ـ المحركات الكهربائية المساعدة electrical servomotors: إن الروبوت الذي يستخدم أنظمة القيادة الكهربائية يكون دقيقاً جداً إلا أن قدرته على حمل الأثقال تكون محدودة عادة.
ـ الأسطوانات الهدروليكية hydraulic cylinder: إن الروبوت الذي يستخدم الأنظمة الهدروليكية التي تعتمد على ضغط الموائع يكون قادراً على رفع الأثقال الكبيرة ولكن دقته تكون محدودة نسبياً.
ـ أسطوانات الهواء المضغوط pneumatic cylinder: وهي تشبه الأنظمة الهدروليكية إلا أنها تعتمد على ضغط الهواء، وبالتالي تستطيع حمل أوزان أخف من سابقتها لكنها أكثر منها ليونة ومرونة.
ـ العضلات الصنعية artificial muscles: وهي تعتمد على ضغط الهواء أيضاً، ويشبه عملها عضلات الإنسان ولديها القدرة على التقلص وليس على الدفع، مما يعطيها ليونة طبيعية.
تـطبيقات الروبوتية
يمكن استخدام الروبوت في أي مكان ثلاثي الأبعاد للقيام بأعمال صعبة أو خطرة، أو لا يستطيع الإنسان القيام بها بشكل فعال. ففي الصناعة يمكن استخدام الروبوت في التصنيع، والتجميع، واللحام والطلاء بالبخ الحراري. ويستخدم الروبوت أيضاً في الفضاء وتحت البحار وفي المنشآت النووية الخطرة. كما يمكن استخدامه في المستشفيات لمساعدة ذوي الاحتياجات الخاصة وفي عمليات التنظيف والأشغال المنزلية.
تدعى الأدوات التي يتم وصلها إلى نهاية ذراع الروبوت والتي تسمح له بالقيام بالأعمال المفيدة المكلف بها بالنهايات الفاعلة المنفِّذة end effectors، ولا تعد هذه النهايات جزءاً من الروبوت، وإنما قطعاً منفردة عنه تُصمم وتُنفذ بشكل مستقل ولها أنواع كثيرة أهمها: اللواقط، والقواطع، والمثاقب، والمكابس، والملاحم وأجهزة القياس والضغط والليزر.
الآفاق المستقبلية
تتطور التطبيقات الروبوتية حالياً باتجاه الروبوت المتكامل القادر على تحسس المحيط الذي يتحرك ضمنه والتعلم منه والتأقلم معه والتصرف وفق الشروط المستجدة. إذ لم يعد الروبوت يتصرف وفق برنامج محدد مسبقاً وإنما يقوم باستنتاج ما يجب عمله وفق المعطيات الآنية التي يتحسسها، وتستخدم الشبكات العصبونية[ر] في عملية التحكم بالروبوت. تسمح هذه التقنية التي تحاكي بنية الدماغ البشري وآلية عمله بتزويد الروبوت بالقدرة على التعلم من أمثلة سابقة والتأقلم مع الظروف والمستجدات. وقد ظهر مؤخراً روبوت يقود فرقة موسيقية لعزف سيمفونية، وآخر يصعد على درج ويتجاوز العقبات التي يمكن أن تعترض طريقه. ويمكن القول أن التقانة الروبوتية تقترب شيئاً فشيئاً من الإنسان الآلي الذي يملك قدراً من
رامز حاج إسلام
Robotics - Robotique
الروبوتية
الروبـوت robot جهـاز إلكتروميكانيكي قابل للبرمجة على عدة درجات من حرية الحركة، ويستطيع أداء مهام متعددة. تُعرَّف «درجات الحرية» (degrees of freedom) DOF، المشار إليها بالرموز a,b,d,U,Y,W في الشكل1، بأنها حركات مستقلة متتالية يستطيع الجهاز القيام بها، وتدعى أيضاً بالحركية mobility.
لمحة تاريخية
عرف العالم منذ العصور القديمة الكثير من المخترعات التي تعمل آلياً وتشبه عمل الروبوت وفق تصميم محدد. ومن ذلك طرائق إغلاق منافذ الأهرام لدى المصريين القدماء واستخراج المياه ورفعها والساعات المائية والدقاقة التي عرفها العرب وصمموها ونفذوها. ويورد كتاب «الحيل» لبني موسى بن شاكر نماذج كثيرة تشبه في عملها عمل الروبوت الحديث، إلا أن حركتها تعتمد على مصادر طاقة الماء أو الريح. ومن ذلك مثلاً: صنعة سراج يخرج الفتيلة لنفسه ويصب الزيت لنفسه وكل من يراه يظن أن النار لا تأكل من الزيت ولا من الفتيلة شيئاً، ويُعرف هذا السراج بسراج الله، ومن ذلك أيضاً المنبر الذي صممه الحاج يعيش المالقي للجامع الكبير بقرطبة، فيخرج المنبر من الحائط بقوة دفع المياه عند صعود الإمام، ويعود إلى موضعه حين ينزل. ويعد ليوناردو دافنشي (ق 15 م) أول من وضع تصاميم ونماذج مشابهة للروبوت، لكن كلمة الروبوت ظهرت للمرة الأولى في مسرحية للكاتب المسرحي التشيكوسلوفاكي كارل تشابك[ر] Karl Capek في مسرحيته «إنسان روسوم الآلي الشامل» Rossum’s Universal Robots. وتعني كلمة روبوتا robota في اللغة التشيكية العامل أو الخادم الريفي. وتولى إسحق عظيموف Isaac Asimov عام 1930 نشر مصطلح الروبوتية robotics عبر مجموعة كبيرة من قصص الخيال العلمي المبتكرة.
 |
| الشكل (1) درجات حرية حركة الروبوت |
المبادئ العامة للروبوتية ومكوناتها الأساسية
تشتمل جميع تطبيقات الروبوتية على ثلاث مكونات أساسية هي: الحساسات، والروبوت، والتحكم الحاسوبي كما هو موضح في الشكل2. فبوساطة الحساسات يتم التقاط معطيات المحيط الذي يجب على الروبوت أن يعمل ضمنه، وتشكل هذه المعطيات بيانات دخل للبرنامج الحاسوبي الذي يتحكم بحركة الروبوت وأدائه.
وأهم أنواع الحساسات المستخدمة في الروبوتات هي حساسات الرؤية، مثل الكاميرات بأنواعها، والحساسات الضوئية وتحت الحمراء، إضافة إلى حساسات الصوت واللمس والقوة والضغط والمسافة والحركة وغيرها.
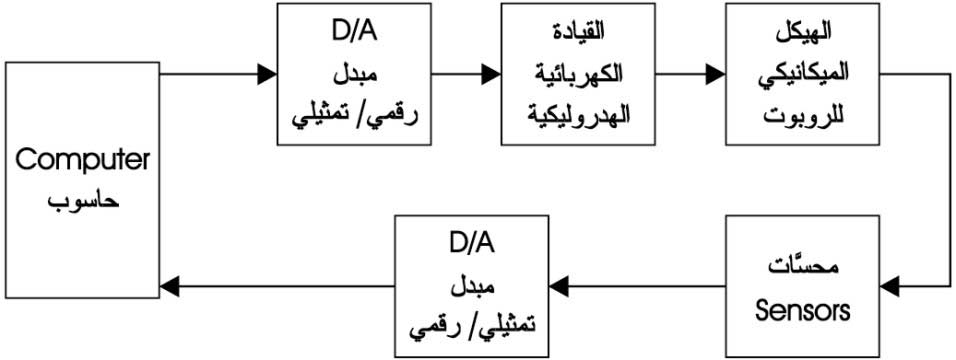 |
| الشكل (2) المخطط الصندوقي لنظام الروبوت والتحكم به |
1ـ التحكم من بعد teleportation: وفيه يتولى المستخدم البشري التحكم بحركة الروبوت بوساطة عصا قيادة أو بوساطة جهاز تحكم من بعد وتوجيه حركته نحو الهدف.
2ـ التخزين المسبق للحركة lead through programming: يجري تخزين المِعاملات والقيم الرقمية للمسار المطلوب، ويتحرك الروبوت وفق هذا المسار المخزَّن في ذاكرته فقط.
3ـ البرمجة المسبقة offline programming: يُبرمج الروبوت للقيام بالحركة وفق برنامج حاسوبي محدد مسبقاً.
4ـ الحركة المستقلة autonomous: يتحكم الروبوت فيها بحركته مستقلاً وتلقائياً، فيقوم الروبوت بتعلم مسار الحركة من خلال أمثلة سابقة يمكن تزويده بها.
يمكن استخدام إحدى هذه الطرائق أو تركيب أكثر من طريقة لاستخدامها معاً.
أنواع الروبوتات
يمكن تصنيف حركة الروبوت وفق عدة نظم مختلفة:
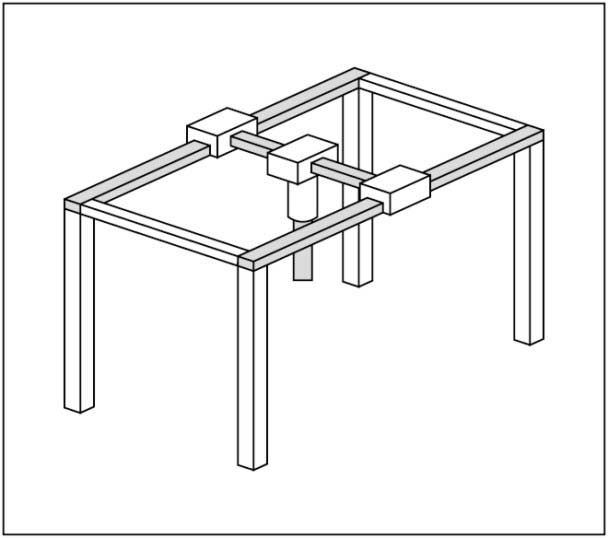
ـ الخطّي cartesian: يتحرك الروبوت وفق ثلاثة محاور خطية (X,Y,Z). ويستخدم عادة لحمل ونقل الأوزان الثقيلة (الشكل ـ3).
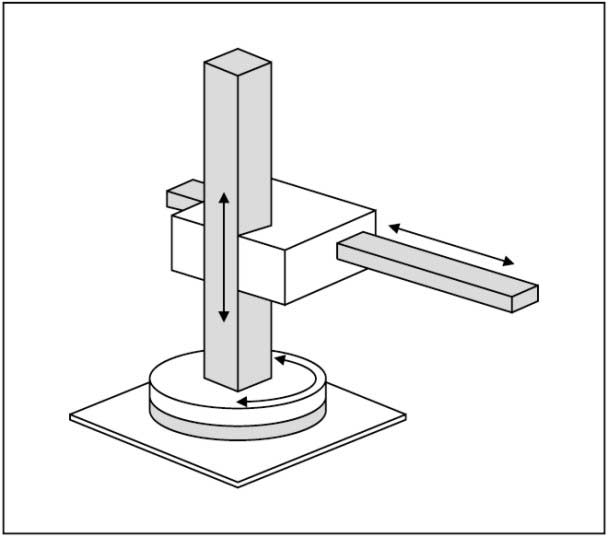
ـ الأسطواني cylindrical: يتحرك الروبوت وفق نظام الإحداثيات الأسطوانية (R, Θ,Z). ويستخدم عادة في عمليات التجميع (الشكل ـ4).
ـ الكروي spherical: يتحرك الروبوت وفق نظام الإحداثيات الكروية (R, Θ, Φ) (الشكل ـ5).
 |
 |
 |
| الشكل (3) الربوت الخطي | الشكل (4) الروبوت الأسطواني | الشكل (5) الروبوت الكروي |
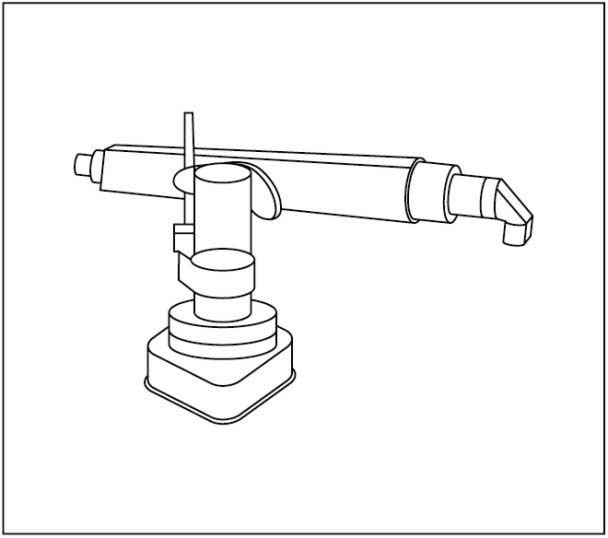
ـ الذراع المفصلي المطاوع الانتقائي SCARA (selective compliance articulated robot arm): وهو مزيج بين الروبوت الأسطواني والروبوت المفصلي بطريقة تسمح بالاستفادة من إيجابيات كل نوع منهما، وتستطيع ذراع الروبوت التحرك نحو الأعلى أو الأسفل وبزاوية حول محور الأسطوانة كما في الروبوت الأسطواني، ولكنها تكون موصولة بطريقة التفافية لتسمح للروبوت بأخذ وضعيته بدقة وسرعة (الشكل ـ7).
 |
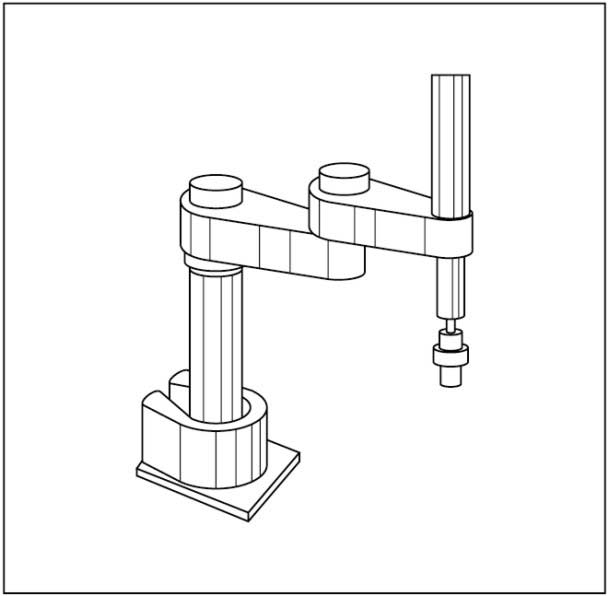 |
| الشكل (6) الروبوت المفصلي | الشكل (7) الذراع المفصلي المطاوع الإنتقالي |
أجزاء الروبوت
الروبوت جهاز الكتروميكانيكي يتكون من أجزاء كهربائية وأخرى ميكانيكية، لذلك فإن نوعية الأنظمة المستخدمة للتحكم به تحدد خصائصه الأساسية كالسرعة والدقة والتكرارية والقدرة على حمل الأوزان. وفيما يلي أهم التقنيات المستخدمة في تصنيع أجزاء الروبوت:
ـ المحركات الكهربائية المساعدة electrical servomotors: إن الروبوت الذي يستخدم أنظمة القيادة الكهربائية يكون دقيقاً جداً إلا أن قدرته على حمل الأثقال تكون محدودة عادة.
ـ الأسطوانات الهدروليكية hydraulic cylinder: إن الروبوت الذي يستخدم الأنظمة الهدروليكية التي تعتمد على ضغط الموائع يكون قادراً على رفع الأثقال الكبيرة ولكن دقته تكون محدودة نسبياً.
ـ أسطوانات الهواء المضغوط pneumatic cylinder: وهي تشبه الأنظمة الهدروليكية إلا أنها تعتمد على ضغط الهواء، وبالتالي تستطيع حمل أوزان أخف من سابقتها لكنها أكثر منها ليونة ومرونة.
ـ العضلات الصنعية artificial muscles: وهي تعتمد على ضغط الهواء أيضاً، ويشبه عملها عضلات الإنسان ولديها القدرة على التقلص وليس على الدفع، مما يعطيها ليونة طبيعية.
تـطبيقات الروبوتية
يمكن استخدام الروبوت في أي مكان ثلاثي الأبعاد للقيام بأعمال صعبة أو خطرة، أو لا يستطيع الإنسان القيام بها بشكل فعال. ففي الصناعة يمكن استخدام الروبوت في التصنيع، والتجميع، واللحام والطلاء بالبخ الحراري. ويستخدم الروبوت أيضاً في الفضاء وتحت البحار وفي المنشآت النووية الخطرة. كما يمكن استخدامه في المستشفيات لمساعدة ذوي الاحتياجات الخاصة وفي عمليات التنظيف والأشغال المنزلية.
تدعى الأدوات التي يتم وصلها إلى نهاية ذراع الروبوت والتي تسمح له بالقيام بالأعمال المفيدة المكلف بها بالنهايات الفاعلة المنفِّذة end effectors، ولا تعد هذه النهايات جزءاً من الروبوت، وإنما قطعاً منفردة عنه تُصمم وتُنفذ بشكل مستقل ولها أنواع كثيرة أهمها: اللواقط، والقواطع، والمثاقب، والمكابس، والملاحم وأجهزة القياس والضغط والليزر.
الآفاق المستقبلية
تتطور التطبيقات الروبوتية حالياً باتجاه الروبوت المتكامل القادر على تحسس المحيط الذي يتحرك ضمنه والتعلم منه والتأقلم معه والتصرف وفق الشروط المستجدة. إذ لم يعد الروبوت يتصرف وفق برنامج محدد مسبقاً وإنما يقوم باستنتاج ما يجب عمله وفق المعطيات الآنية التي يتحسسها، وتستخدم الشبكات العصبونية[ر] في عملية التحكم بالروبوت. تسمح هذه التقنية التي تحاكي بنية الدماغ البشري وآلية عمله بتزويد الروبوت بالقدرة على التعلم من أمثلة سابقة والتأقلم مع الظروف والمستجدات. وقد ظهر مؤخراً روبوت يقود فرقة موسيقية لعزف سيمفونية، وآخر يصعد على درج ويتجاوز العقبات التي يمكن أن تعترض طريقه. ويمكن القول أن التقانة الروبوتية تقترب شيئاً فشيئاً من الإنسان الآلي الذي يملك قدراً من
رامز حاج إسلام